Our research interests are:
Design Of Locomotion Systems With Non-Trivial Morphologies; Analysis And Closed-Loop Feedback Design
Of Mobile Robots; Robot Locomotion Theory; Bio-Inspired Robot Locomotion
ROBOTIC BIOMIMICRY OF SMALL LOCOMOTION ANIMALS
x
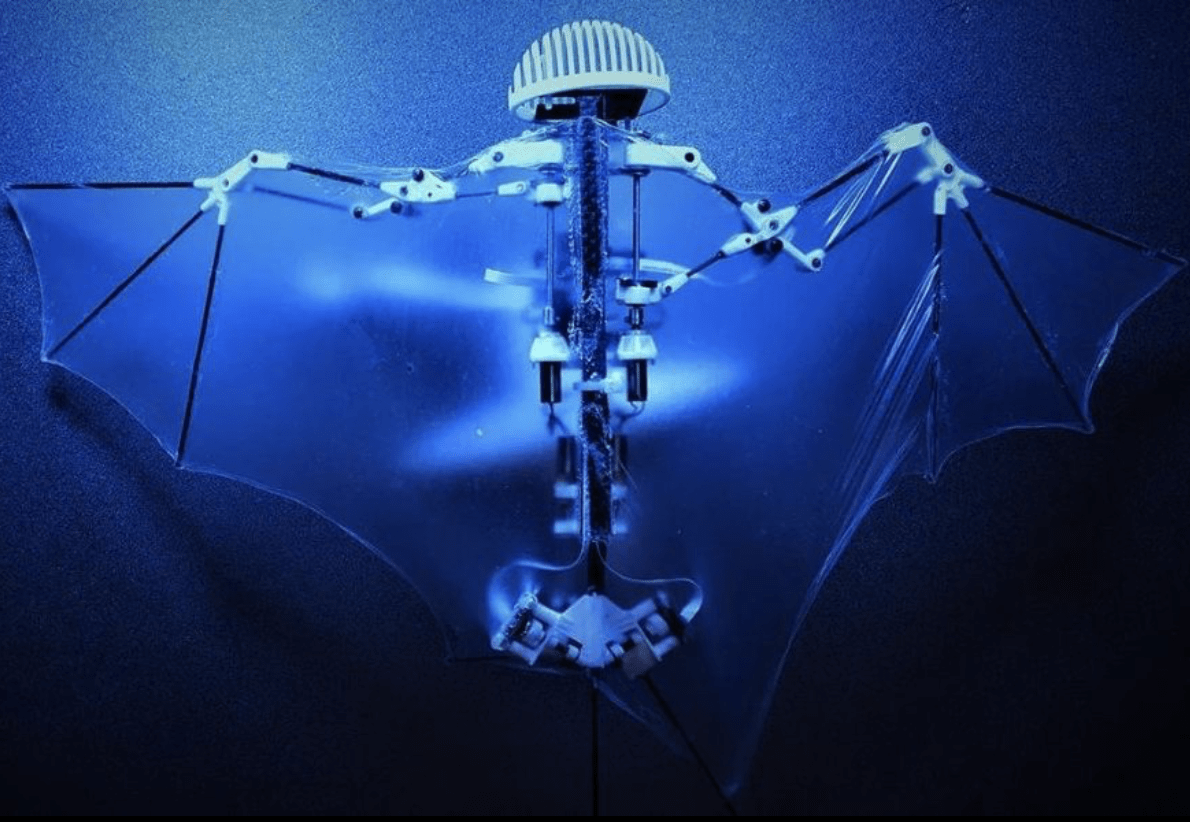
The robotic biomimicry of small locomotion animals that dynamically interact with their environment (e.g., bats) introduces challenges of different natures. These systems are multi-joint with many passive and active coordinates. As a result, control design and actuation become very challenging in the face of prohibitive design restrictions such as limited computation resources, payload, power budget, etc. We utilize computational resources presented by hardware structures to combat the actuation and control challenges.
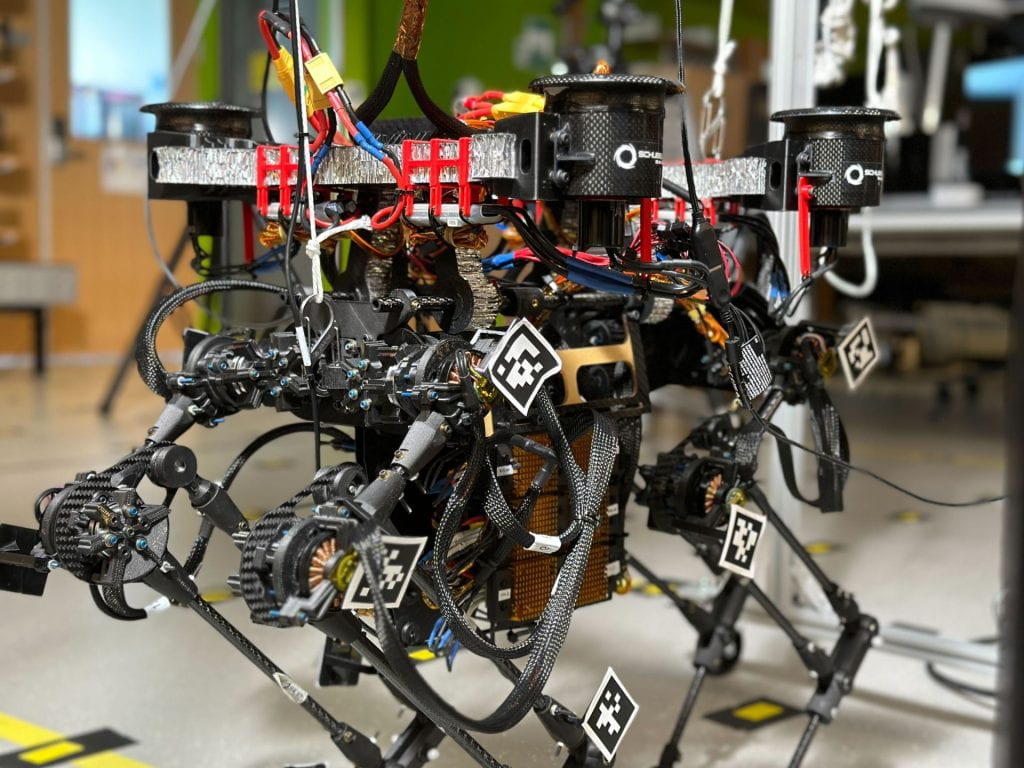
MULTI-MODAL SYSTEMS WITH EXTENSIVE LOCOMOTION PLASTICITY
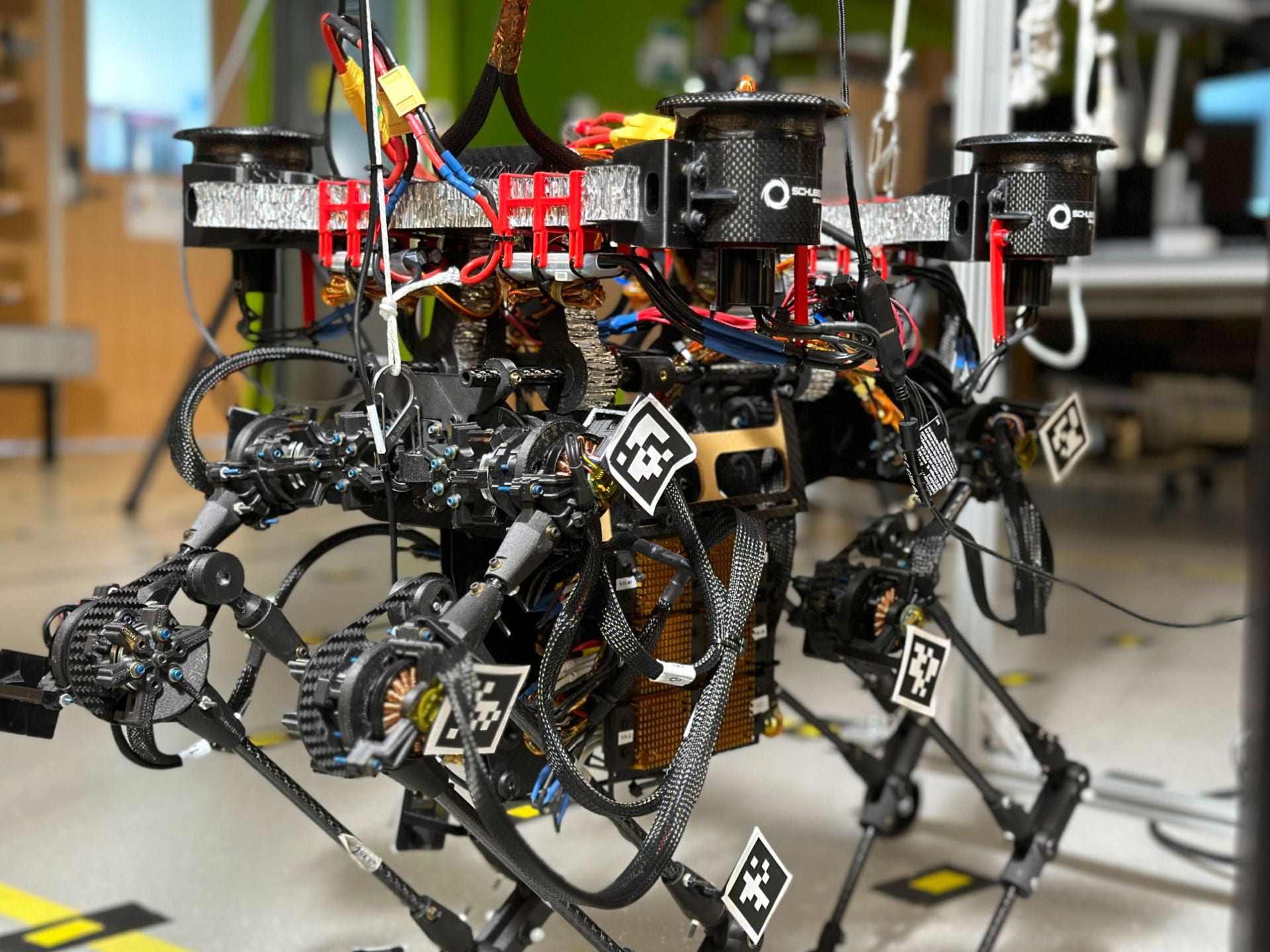
Multi-modal locomotion systems, such as a bird, accommodate multiple mobility styles and possess remarkable locomotion plasticity. The major problem is that various mobility forms can dictate conflicting requirements, making robot hardware design and control very challenging. For instance, the payload can negatively affect flight performance in aerial systems. Conversely, legged robots require high-torque actuators, which are bulky and heavy. Aerial flight dynamics are nonlinear and continuous, whereas legged systems are switching nonlinear systems that intermittently interact with their environment. Integrating these conflicting requirements into a single platform can be a significant ordeal. We use computer algorithms to design hardware and control generatively, which helps accommodate conflicting requirements through redundancy in design space.
SNAKES ON THE MOON!
xz
x
We have explored other exciting forms of locomotion that serve missions’ objectives in environments that pose complete risks of immobilization to standard systems. One of these demanding environments is the permanently shadowed regions (PSRs) on Moon. The craters on Moon’s PSRs pose tremendous mobility challenges that remain unsolved. Please see “Learn More”.


Media Coverage












Research Highlights
Science Magazine
Two cover articles of Science (Robotics) Magazine; One Science Article in top 5% of all research outputs scored by Science Magazine Altmetric
Winner of NASA’s Game-Changing Program Award
Two time Finalists In NASA’s Space Technology Mission Directorate’s BIG Idea Competitions
Nature Highlight’s
Research Results On Bat Flight Featured In Nature
Winner of NASA’s ARTEMIS Award
Scored Highest Across Evaluation Criteria Among The Finalist Teams In NASA BIG Idea Challenge 2022 To Take Top Honor
What we do is important
Our works reside at the intersection of control and mobile robot design, the intersection of theory and experiment (hardware). Our overarching objective is to tightly integrate systems with impressive locomotion plasticity in environments where standard (wheeled, legged, aerial drones, etc.) mobile robots face the risk of complete immobilization. Imagine flight inside HVAC pipes in a building, ground mobility over steep and rocky terrains on Mars, or dynamic walking on vertical surfaces; our robots can operate in these environments.