Northeastern University
The Action Lab
Dagmar Sternad
Research









News
Sabra Receives the NSF GRFP Award!

Sabra, a postbaccalaureate in the Action Lab, has won the NSF Graduate Research Fellowship and will pursue a PhD at Stanford in Neural Engineering. Congrats Sabra!
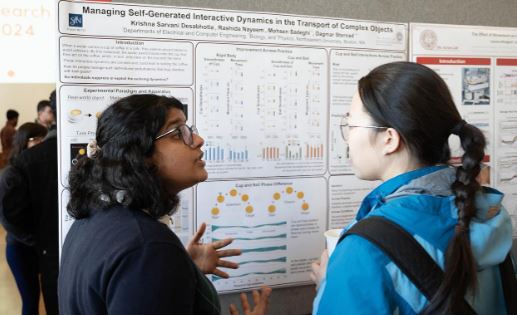
Action Lab Members Present at Northeastern’s Annual COE Research Expo
On Feb. 26th, the engineering PhD students in the lab had the opportunity to present their research at the annual Northeastern College of Engineering (COE) Research Expo. Pictured below is Vani, featured in Northeastern’s COE Instagram, presenting her work on “Managing Self-Generated Interactive Dynamics in the Transport of Complex Objects”.
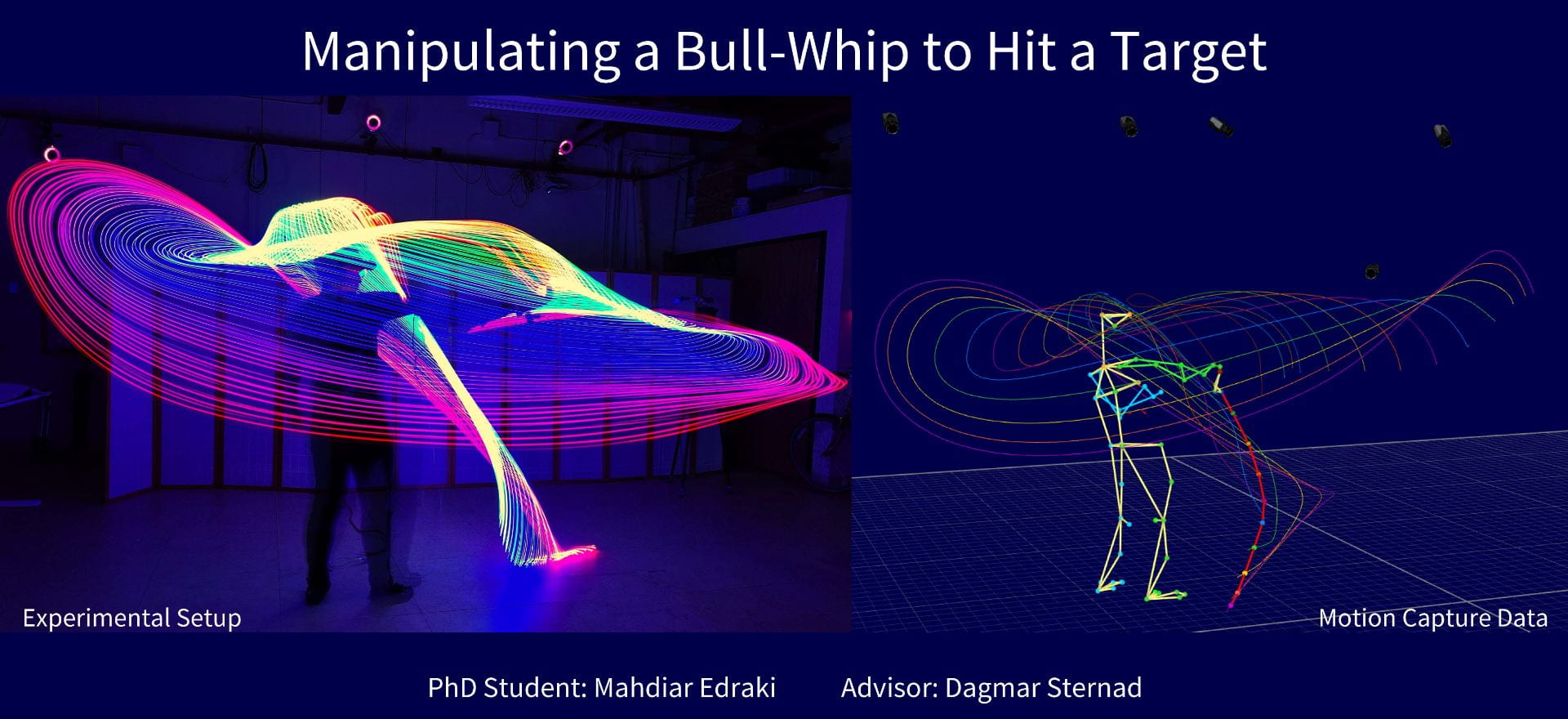
Mahdi Wins First Prize in Northeastern’s Arts in Mechanical Engineering Research Expo
Madhi, our card-carrying mechanical engineer, won the first prize in Arts in the ME Research Expo. Here is his beautiful poster on “Manipulating a Bull-Whip to Hit a Target”